Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 108P from Chapter 10 from Hibbeler's Engineering Mechanics.
Problem 108P
Step-by-Step Solution
We are given the mass of a two slender rods AB and OC as ${m_{AB}} = {m_{OC}} = 3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}$ and the mass of thin plate as ${m_p} = 12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}$.
We are asked to determine the location $\bar y$ of the center of mass G of the pendulum and also to calculate the moment of inertia of the pendulum about an axis perpendicular to the page and passing through G.
Step 2
The free-body diagram of the entire system can be drawn as:
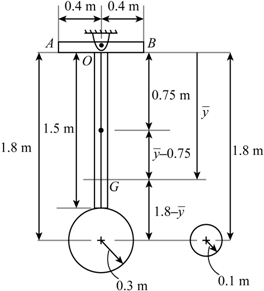
To calculate the location of the center of mass G of a pendulum, we have:
\[\bar y = \frac{{{m_{OC}}{{y'}_{OC}} + {m_{{p_1}}}{{y'}_p} - {m_{{p_2}}}{{y'}_p}}}{{{m_{OC}} + {m_{{p_1}}} - {m_{{p_2}}} + {m_{AB}}}}\]Here, ${m_{OC}}$ is the mass of slender rod OC, ${y'_{OC}}$ is the position of center of mass of rod OC, ${m_{{p_1}}}$ is the mass of plate 1, ${y'_p}$ is the position of center of mass of plate 1, ${m_{{p_2}}}$ is the mass of plate 2 and ${m_{AB}}$ is the mass of slender rod AB.
Substitute the values in the above expression, we get:
\[\begin{array}{c} \bar y = \frac{{\left[ \begin{array}{l} \left\{ {\left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times \left( {1.5\;{\rm{m}}} \right) \times \left( {0.75\;{\rm{m}}} \right)} \right\} + \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.3\;{\rm{m}}} \right)}^2} \times \left( {1.8\;{\rm{m}}} \right)} \right\} - \\ \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.1\;{\rm{m}}} \right)}^2} \times \left( {1.8\;{\rm{m}}} \right)} \right\} \end{array} \right]}}{{\left[ \begin{array}{l} \left\{ {\left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times \left( {1.5\;{\rm{m}}} \right)} \right\} + \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.3\;{\rm{m}}} \right)}^2}} \right\} - \\ \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.1\;{\rm{m}}} \right)}^2}} \right\} + \left\{ {\left( {0.8\;{\rm{m}}} \right) \times \left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right)} \right\} \end{array} \right]}}\\ \bar y = \frac{{8.803}}{{9.916}}\\ \bar y = 0.8878\;{\rm{m}} \end{array}\]To calculate the moment of inertia of the slender AB about an axis perpendicular to the page and passing through G, we have:
\[\begin{array}{c} {I_1} = \frac{1}{{12}}{m_{AB}}I_{AB}^2 + {m_{AB}}d_{AB}^2\\ {I_1} = \frac{1}{{12}}{m_{AB}}I_{AB}^2 + {m_{AB}}\bar y \end{array}\]Substitute the values in the above expression, we get:
\[\begin{array}{l} {I_1} = \left[ \begin{array}{l} \frac{1}{{12}} \times \left( {0.8\;{\rm{m}}} \right) \times \left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times {\left( {0.8\;{\rm{m}}} \right)^2} + \\ \left( {0.8\;{\rm{m}}} \right) \times \left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times {\left( {0.8878\;{\rm{m}}} \right)^2} \end{array} \right]\\ {I_1} = \left( {0.128\;{\rm{kg}} \cdot {{\rm{m}}^2}} \right) + \left( {1.891\;{\rm{kg}} \cdot {{\rm{m}}^2}} \right)\\ {I_1} = 2.019\;{\rm{kg}} \cdot {{\rm{m}}^2} \end{array}\]To calculate the moment of inertia of the slender OC about an axis perpendicular to the page and passing through G, we have:
\[\begin{array}{c} {I_1} = \frac{1}{{12}}{m_{OC}}I_{OC}^2 + {m_{OC}}d_{OC}^2\\ {I_1} = \frac{1}{{12}}{m_{OC}}I_{OC}^2 + {m_{OC}}\left( {\bar y - 0.75\;{\rm{m}}} \right) \end{array}\]Substitute the values in the above expression, we get:
\[\begin{array}{l} {I_2} = \left[ \begin{array}{l} \frac{1}{{12}} \times \left( {1.5\;{\rm{m}}} \right) \times \left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times {\left( {1.5\;{\rm{m}}} \right)^2} + \\ \left( {1.5\;{\rm{m}}} \right) \times \left( {3\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {\rm{m}}}} \right. } {\rm{m}}}} \right) \times {\left( {0.8878\;{\rm{m}} - 0.75\;{\rm{m}}} \right)^2} \end{array} \right]\\ {I_2} = \left( {0.84375\;{\rm{kg}} \cdot {{\rm{m}}^2}} \right) + \left( {0.08545\;{\rm{kg}} \cdot {{\rm{m}}^2}} \right)\\ {I_2} = 0.9292\;{\rm{kg}} \cdot {{\rm{m}}^2} \end{array}\]Step 3
To calculate the moment of inertia of the plate 1 about an axis perpendicular to the page and passing through G, we have:
\[\begin{array}{c} {I_3} = \frac{1}{2}{m_{{p_1}}}I_{{p_1}}^2 + {m_{{p_1}}}d_{{p_1}}^2\\ {I_3} = \frac{1}{2}{m_{{p_1}}}I_{{p_1}}^2 + {m_{{p_1}}}{\left( {1.8\;{\rm{m}} - \bar y} \right)^2} \end{array}\]Here, ${d_p}$ is the distance between centroid and the center of a plate.
Substitute the values in the above expression, we get:
\[\begin{array}{c} {I_3} = \left[ \begin{array}{l} \frac{1}{2}\left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times {{\left( {0.3\;{\rm{m}}} \right)}^2} \times \pi \times {{\left( {0.3\;{\rm{m}}} \right)}^2}} \right\} + \\ \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.3\;{\rm{m}}} \right)}^2}} \right\} \times {\left( {1.8\;{\rm{m}} - 0.8878\;{\rm{m}}} \right)^2} \end{array} \right]\\ {I_3} = \left( {0.1525 + 2.823} \right)\;{\rm{kg}} \cdot {{\rm{m}}^2}\\ {I_3} = 2.9755\;{\rm{kg}} \cdot {{\rm{m}}^2} \end{array}\]To calculate the moment of inertia of the plate 2 about an axis perpendicular to the page and passing through G, we have:
\[\begin{array}{c} {I_4} = \frac{1}{2}{m_{{p_2}}}I_{{p_2}}^2 + {m_{{p_2}}}d_{{p_2}}^2\\ {I_4} = \frac{1}{2}{m_{{p_2}}}I_{{p_2}}^2 + {m_{{p_2}}}{\left( {1.8\;{\rm{m}} - \bar y} \right)^2} \end{array}\]Substitute the values in the above expression, we get:
\[\begin{array}{c} {I_4} = \left[ \begin{array}{l} \frac{1}{2}\left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times {{\left( {0.1\;{\rm{m}}} \right)}^2} \times \pi \times {{\left( {0.1\;{\rm{m}}} \right)}^2}} \right\} - \\ \left\{ {\left( {12\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) \times \pi \times {{\left( {0.1\;{\rm{m}}} \right)}^2}} \right\} \times {\left( {1.8\;{\rm{m}} - 0.8878\;{\rm{m}}} \right)^2} \end{array} \right]\\ {I_4} = \left( {1.88 \times {{10}^{ - 3}} + 0.3137} \right)\;{\rm{kg}} \cdot {{\rm{m}}^2}\\ {I_4} = 0.31558\;{\rm{kg}} \cdot {{\rm{m}}^2} \end{array}\]The moment of inertia of the pendulum about an axis perpendicular to the page and passing through G can be calculated as:
\[\begin{array}{c} {I_G} = {I_1} + {I_2} + {I_3} + {I_4}\\ {I_G} = \left( {2.019\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) + \left( {0.9292\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) + \left( {2.9755\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right) - \left( {0.31558\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}}} \right)\\ {I_G} = 5.61\;{{{\rm{kg}}} \mathord{\left/ {\vphantom {{{\rm{kg}}} {{{\rm{m}}^2}}}} \right. } {{{\rm{m}}^2}}} \end{array}\]