Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 68P from Chapter 10 from Hibbeler's Engineering Mechanics.
Problem 68P
Step-by-Step Solution
We are given the following data:
The value of angle is $\theta = 20^\circ $.
We are asked to determine the distance $\bar y$ to the centroid of the area and then calculate the moments of inertia ${I_{\rm{u}}}$ and ${I_{\rm{v}}}$ of the channel’s cross-sectional area.
Step 2
We can divide the total beam’s cross-sectional area into three rectangles that are marked with symbol 1, 2 and 3.
We will draw the free-body diagram of the beam.
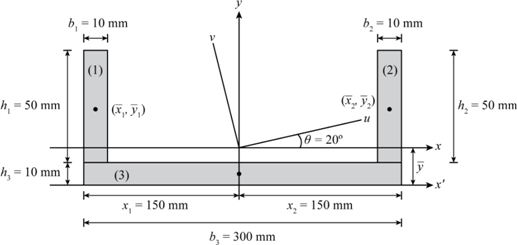
Here, $\left( {{{\bar x}_1},{{\bar y}_1}} \right)$ represent the centroid of first rectangle, $\left( {{{\bar x}_2},{{\bar y}_2}} \right)$ represent the centroid of second rectangle, $\left( {{{\bar x}_3},{{\bar y}_3}} \right)$ represent the centroid of the third rectangle, ${b_1}$ and ${h_1}$ represent the width and height of first rectangle, ${b_2}$ and ${h_2}$ represent the width and height of the second rectangle and ${b_3}$ and ${h_3}$ represent the width and height of the third rectangle respectively.
The formula to calculate the centroid of the first rectangle is given by,
\[\left( {{{\bar x}_1},{{\bar y}_1}} \right) = \left[ { - \left( {{x_1} - \frac{{{b_1}}}{2}} \right),\left( {{h_3} + \frac{{{h_1}}}{2}} \right)} \right]\]Substitute all the known values in the above formula.
\[\begin{array}{c} \left( {{{\bar x}_1},{{\bar y}_1}} \right) = \left[ { - \left( {150 - \frac{{10}}{2}} \right)\;{\rm{mm}}\;{\rm{,}}\;\left( {10 + \frac{{50}}{2}} \right)\;{\rm{mm}}} \right]\\ = \left[ { - 145\;{\rm{,}}\;{\rm{35}}} \right]\;{\rm{mm}} \end{array}\]Step 3
The formula to calculate the centroid of the second rectangle is given by,
\[\left( {{{\bar x}_2},{{\bar y}_2}} \right) = \left[ {\left( {{x_2} - \frac{{{b_2}}}{2}} \right),\left( {{h_3} + \frac{{{h_2}}}{2}} \right)} \right]\]Substitute all the known values in the above formula.
\[\begin{array}{c} \left( {{{\bar x}_2},{{\bar y}_2}} \right) = \left[ {\left( {150 - \frac{{10}}{2}} \right)\;{\rm{mm}}\;{\rm{,}}\;\left( {10 + \frac{{50}}{2}} \right)\;{\rm{mm}}} \right]\\ = \left[ {145\;{\rm{,}}\;{\rm{35}}} \right]\;{\rm{mm}} \end{array}\]Step 4
The formula to calculate the centroid of the third rectangle is given by,
\[\left( {{{\bar x}_3},{{\bar y}_3}} \right) = \left[ {0,\frac{{{h_3}}}{2}} \right]\]Substitute all the known values in the above formula.
\[\begin{array}{c} \left( {{{\bar x}_3},{{\bar y}_3}} \right) = \left[ {0\;{\rm{,}}\;\left( {\frac{{10}}{2}} \right)\;{\rm{mm}}} \right]\\ = \left[ {0\;{\rm{,}}\;{\rm{5}}} \right]\;{\rm{mm}} \end{array}\]Step 5
The formula to calculate the distance $\bar y$ is given by,
\[\begin{array}{c} \bar y = \left[ {\frac{{{{\bar y}_1}{A_1} + {{\bar y}_2}{A_2} + {{\bar y}_3}{A_3}}}{{{A_1} + {A_2} + {A_3}}}} \right]\\ = \left[ {\frac{{{{\bar y}_1}{b_1}{h_1} + {{\bar y}_2}{b_2}{h_2} + {{\bar y}_3}{b_3}{h_3}}}{{{b_1}{h_1} + {b_2}{h_2} + {b_3}{h_3}}}} \right] \end{array}\]Substitute all the known values in the above formula.
\[\begin{array}{c} \bar y = \left[ {\frac{{\left\{ \begin{array}{l} \left( {35\;{\rm{mm}}} \right) \times \left( {50\;{\rm{mm}}\; \times {\rm{10}}\;{\rm{mm}}} \right)\\ + \left( {35\;{\rm{mm}}} \right) \times \left( {50\;{\rm{mm}}\; \times {\rm{10}}\;{\rm{mm}}} \right)\\ + \left( {5\;{\rm{mm}}} \right)\left( {300\;{\rm{mm}}\; \times {\rm{10}}\;{\rm{mm}}} \right) \end{array} \right\}}}{\begin{array}{l} \left( {50\;{\rm{mm}} \times {\rm{10}}\;{\rm{mm}}} \right)\\ + \left( {50\;{\rm{mm}} \times {\rm{10}}\;{\rm{mm}}} \right)\\ + \left( {300\;{\rm{mm}} \times {\rm{10}}\;{\rm{mm}}} \right) \end{array}}} \right]\\ = \left[ {\frac{{50000\;{\rm{m}}{{\rm{m}}^{\rm{3}}}}}{{4000\;{\rm{m}}{{\rm{m}}^{\rm{2}}}}}} \right]\\ = 12.5\;{\rm{mm}} \end{array}\]Step 6
The formula to calculate the moment of inertia about the $x$ axis is given by,
\[\begin{array}{c} {I_{\rm{x}}} = \left[ \begin{array}{l} \left( {\frac{{{b_1}{h_1}^3}}{{12}}} \right) + \left( {{A_1}{{\left( {{{\bar y}_1} - \bar y} \right)}^2}} \right)\\ + \left( {\frac{{{b_2}{h_2}^3}}{{12}}} \right) + \left( {{A_2}{{\left( {{{\bar y}_2} - \bar y} \right)}^2}} \right)\\ + \left( {\frac{{{b_3}{h_3}^3}}{{12}}} \right) + \left( {{A_3}{{\left( {{{\bar y}_3} - \bar y} \right)}^2}} \right) \end{array} \right]\\ = \left[ \begin{array}{l} \left( {\frac{{{b_1}{h_1}^3}}{{12}}} \right) + \left( {{b_1}{h_1}{{\left( {{{\bar y}_1} - \bar y} \right)}^2}} \right)\\ + \left( {\frac{{{b_2}{h_2}^3}}{{12}}} \right) + \left( {{b_2}{h_2}{{\left( {{{\bar y}_2} - \bar y} \right)}^2}} \right)\\ + \left( {\frac{{{b_3}{h_3}^3}}{{12}}} \right) + \left( {{b_3}{h_3}{{\left( {{{\bar y}_3} - \bar y} \right)}^2}} \right) \end{array} \right] \end{array}\]Here, ${I_{\rm{x}}}$ represent the moment of inertia about the $x$ axis and ${A_1}$ ,${A_2}$ and ${A_3}$ represent the cross-sectional area of the first second and third rectangles respectively.
Substitute all the known values in the above formula.
\[\begin{array}{c} {I_{\rm{x}}} = \left[ \begin{array}{l} \left[ {\frac{{\left( {10\;{\rm{mm}}} \right){{\left( {50\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {50\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {35\;{\rm{mm}}\; - 12.5\;{\rm{mm}}} \right)}^2}} \right]\\ + \left[ {\frac{{\left( {10\;{\rm{mm}}} \right){{\left( {50\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {50\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {35\;{\rm{mm}}\; - 12.5\;{\rm{mm}}} \right)}^2}} \right]\\ + \left[ {\frac{{\left( {300\;{\rm{mm}}} \right){{\left( {10\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {300\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {5\;{\rm{mm}}\; - 12.5\;{\rm{mm}}} \right)}^2}} \right] \end{array} \right]\\ = \left[ {357291.67\; + 357291.67 + 193750} \right]\;{\left( {{\rm{mm}}} \right)^4}\\ \; \approx 90.83 \times {10^4}\;{\left( {{\rm{mm}}} \right)^4} \end{array}\]Step 7
The formula to calculate the moment of inertia about the $y$ axis is given by,
\[\begin{array}{c} {I_{\rm{y}}} = \left[ \begin{array}{l} \left( {\frac{{{h_1}{b_1}^3}}{{12}}} \right) + \left( {{A_1}{{\left( {{{\bar x}_1}} \right)}^2}} \right)\\ + \left( {\frac{{{h_2}{b_2}^3}}{{12}}} \right) + \left( {{A_2}{{\left( {{{\bar x}_2}} \right)}^2}} \right)\\ + \left( {\frac{{{h_3}{b_3}^3}}{{12}}} \right) + \left( {{A_3}{{\left( {{{\bar x}_3}} \right)}^2}} \right) \end{array} \right]\\ = \left[ \begin{array}{l} \left( {\frac{{{h_1}{b_1}^3}}{{12}}} \right) + \left( {{b_1}{h_1}{{\left( {{{\bar x}_1}} \right)}^2}} \right)\\ + \left( {\frac{{{h_2}{b_2}^3}}{{12}}} \right) + \left( {{b_2}{h_2}{{\left( {{{\bar x}_2}} \right)}^2}} \right)\\ + \left( {\frac{{{h_3}{b_3}^3}}{{12}}} \right) + \left( {{b_3}{h_3}{{\left( {{{\bar x}_3}} \right)}^2}} \right) \end{array} \right] \end{array}\]Here, ${I_{\rm{y}}}$ represent the moment of inertia about the $y$ axis.
Substitute all the known values in the above formula.
\[\begin{array}{c} {I_{\rm{y}}} = \left[ \begin{array}{l} \left[ {\frac{{\left( {50\;{\rm{mm}}} \right){{\left( {10\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {50\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {145\;{\rm{mm}}} \right)}^2}} \right]\\ + \left[ {\frac{{\left( {50\;{\rm{mm}}} \right){{\left( {10\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {50\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {145\;{\rm{mm}}} \right)}^2}} \right]\\ + \left[ {\frac{{\left( {10\;{\rm{mm}}} \right){{\left( {300\;{\rm{mm}}} \right)}^3}}}{{12}}} \right] + \left[ {\left( {300\;{\rm{mm}}} \right)\left( {10\;{\rm{mm}}} \right){{\left( {0\;{\rm{mm}}} \right)}^2}} \right] \end{array} \right]\\ = \left[ {\;10516666.67 + 10516666.67 + 225 \times {{10}^5}} \right]\;{\left( {{\rm{mm}}} \right)^4}\\ \; \approx 43.53 \times {10^6}\;{\left( {{\rm{mm}}} \right)^4} \end{array}\]Step 8
The formula to calculate the maximum moment of inertia ${I_{\rm{u}}}$ is given by,
\[{I_{\rm{u}}} = \left[ {\left( {\frac{{{I_{\rm{x}}} + {I_{\rm{y}}}}}{2}} \right) + \left( {\frac{{{I_{\rm{x}}} - {I_{\rm{y}}}}}{2}} \right)\cos 2\theta } \right]\]Substitute all the known values in the above formula.
\[\begin{array}{c} {I_{\rm{u}}} = \left\{ \begin{array}{l} \left( {\frac{{\left[ {90.83 \times {{10}^4}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] + \left[ {43.53 \times {{10}^6}\;{{\left( {{\rm{mm}}} \right)}^4}} \right]}}{2}} \right)\\ + \left( {\frac{{\left[ {90.83 \times {{10}^4}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] - \left[ {43.53 \times {{10}^6}\;{{\left( {{\rm{mm}}} \right)}^4}} \right]}}{2}} \right)\cos \left( {2 \times 20^\circ } \right) \end{array} \right\}\\ = \left( {\left[ {\;22.22 \times {{10}^6}{{\left( {{\rm{mm}}} \right)}^4}} \right] - \left[ {\;16.33 \times {{10}^6}{{\left( {{\rm{mm}}} \right)}^4}} \right]} \right)\\ \approx \left[ {58.9 \times {{10}^5}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] \end{array}\]Step 9
The formula to calculate the minimum moment of inertia ${I_{\rm{v}}}$ is given by,
\[{I_{\rm{v}}} = \left[ {\left( {\frac{{{I_{\rm{x}}} + {I_{\rm{y}}}}}{2}} \right) + \left( {\frac{{{I_{\rm{x}}} - {I_{\rm{y}}}}}{2}} \right)\cos 2\theta } \right]\]Substitute all the known values in the above formula.
\[\begin{array}{c} {I_{\rm{v}}} = \left\{ \begin{array}{l} \left( {\frac{{\left[ {90.83 \times {{10}^4}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] + \left[ {43.53 \times {{10}^6}\;{{\left( {{\rm{mm}}} \right)}^4}} \right]}}{2}} \right)\\ - \left( {\frac{{\left[ {90.83 \times {{10}^4}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] - \left[ {43.53 \times {{10}^6}\;{{\left( {{\rm{mm}}} \right)}^4}} \right]}}{2}} \right)\cos \left( {2 \times 20^\circ } \right) \end{array} \right\}\\ = \left( {\left[ {\;22.22 \times {{10}^6}{{\left( {{\rm{mm}}} \right)}^4}} \right] + \left[ {\;16.33 \times {{10}^6}{{\left( {{\rm{mm}}} \right)}^4}} \right]} \right)\\ \approx \left[ {38.5 \times {{10}^6}\;{{\left( {{\rm{mm}}} \right)}^4}} \right] \end{array}\]