Step 1 We are given a disk which is rolling without slipping. The following data is given for this system:
The angular acceleration of the disk is, $\alpha = 4{\rm{ rad/}}{{\rm{s}}^2}$.
The angular velocity of the disk is, $\omega = 2{\rm{ rad/s}}$.
The radius of the disk is, $r = 150{\rm{ mm}}$.
We are asked to determine the acceleration of points $A$ and $B$ on the link and the link’sangular acceleration at this instant.
Step 2 The velocity diagram of the link $AB$ is given below:
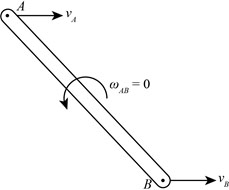
Since both points $A$ and $B$ lie in the same link and in one single line and there is no relative motion between them, so the velocity as well acceleration at each of the points will be the same.
So, the angular velocity of the link $AB$ is given by,
\[{\omega _{AB}} = 0\]
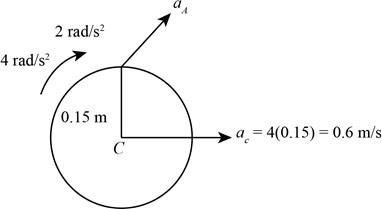
The expression for the linear acceleration of the center $C$ of the disk rolling without slipping in the horizontal $x$ direction is given by,
\[\begin{array}{l} {a_C} = \alpha r\\ {a_C} = 4{\rm{ rad/}}{{\rm{s}}^2} \times 0.15{\rm{ m}}\\ {a_C} = 0.6{\rm{ m/}}{{\rm{s}}^2} \end{array}\]
Step 3 The kinetic diagram of the rolling disk is given below:
Similarly, the vector form for the acceleration of the point $A$ on the disk rolling without slipping is given by,
\[\begin{array}{l} {{\rm{a}}_A} = {{\rm{a}}_C} + \alpha {\rm{r}} - {\omega ^2}{\rm{r}}\\ {{\rm{a}}_A} = 0.6{\bf{i}}{\rm{ + }}\left( { - 4{\bf{k}}} \right) \times \left( {0.15{\bf{j}}} \right) - {\left( 2 \right)^2}\left( {0.15{\bf{j}}} \right)\\ {{\rm{a}}_A} = \left( {1.20{\bf{i}} - 0.6{\bf{j}}} \right){\rm{ m/}}{{\rm{s}}^2} \end{array}\]
The acceleration diagram of the disc showing the components of acceleration is given below:
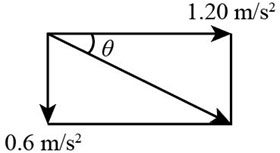
Then the net magnitude of the acceleration of point $A$ is given by,
\[\begin{array}{l} {a_A} = \sqrt {{a_x}^2 + {a_y}^2} \\ {a_A} = \sqrt {{{\left( {1.20{\rm{ m/}}{{\rm{s}}^2}} \right)}^2} + {{\left( { - 0.6{\rm{ m/}}{{\rm{s}}^2}} \right)}^2}} \\ {a_A} = 1.34{\rm{ m/}}{{\rm{s}}^2} \end{array}\]
The direction of the acceleration of point $A$ is given by,
\[\begin{array}{c} {\theta _A} = {\tan ^{ - 1}}\left( {\frac{{{a_y}}}{{{a_x}}}} \right)\\ {\theta _A} = {\tan ^{ - 1}}\left( {\frac{{0.6}}{{1.20}}} \right)\\ {\theta _A} = {\tan ^{ - 1}}\left( {0.5} \right)\\ {\theta _A} = 26.56^\circ \end{array}\]
Step 4 For link $AB$ the relative vector of point $B$ with respect to $A$ is given by,
\[{r_{B/A}} = \left( {0.4{\bf{i}} - 0.3{\bf{j}}} \right){\rm{ m}}\]
Since point $B$ moves only in the horizontal direction, its acceleration vector is given by,
\[{{\rm{a}}_B} = {a_B}{\bf{i}}\]
Using relative motion equation, the acceleration of point $B$ with respect to point $A$ is given by,
\[{{\rm{a}}_B} = {{\rm{a}}_A} + {\alpha _{AB}}{r_{B/A}} - {\omega _{AB}}^2{r_{B/A}}\]
Here, ${\alpha _{AB}}$ is the angular acceleration of the link $AB$. On substituting the values in the above expression, we get,
\[\begin{array}{l} {a_B}{\bf{i}} = \left( {1.20{\bf{i}} - 0.6{\bf{j}}} \right) + {\alpha _{AB}}{\bf{k}} \times \left( {0.4{\bf{i}} - 0.3{\bf{j}}} \right) - 0\\ {a_B}{\bf{i}} = 1.20{\bf{i}} - 0.6{\bf{j}} + 0.4{\alpha _{AB}}{\bf{j}} + 0.3{\alpha _{AB}}{\bf{i}}\\ {a_B}{\bf{i}} = \left( {1.20 + 0.3{\alpha _{AB}}} \right){\bf{i}} + \left( { - 0.6 + 0.4{\alpha _{AB}}} \right){\bf{j}} \end{array}\]
Now comparing ${\bf{i}}$ components from both sides, we get,
\[{a_B} = \left( {1.20 + 0.3{\alpha _{AB}}} \right)\]
Similarly, comparing ${\bf{j}}$ components from both sides, we get,
\[\begin{array}{c} 0 = - 0.6 + 0.4{\alpha _{AB}}\\ {\alpha _{AB}} = \left( {\frac{{0.6}}{{0.4}}} \right)\\ {\alpha _{AB}} = 1.5{\rm{ rad/}}{{\rm{s}}^2} \end{array}\]
Step 5 The, the magnitude of acceleration of point $B$ is given by,
\[\begin{array}{c} {a_B} = \left( {1.20 + 0.3{\alpha _{AB}}} \right)\\ {a_B} = \left( {1.20 + 0.3 \times 1.5} \right){\rm{ m/}}{{\rm{s}}^2}\\ {a_B} = 1.65{\rm{ m/}}{{\rm{s}}^2} \end{array}\]