Step 1 We are given a mechanism producing intermittent motion of link $AB$. The sprocket $S$ is turning at the instant shown.
The angular acceleration of the sprocket is ${\alpha _s} = 2{\rm{ rad/}}{{\rm{s}}^2}$.
The angular velocity of the sprocket is ${\omega _s} = 6{\rm{ rad/s}}$.
We are asked to determine the angular velocity and angular acceleration of link $AB$ at this instant.
Step 2 The diagram showing the motion of the mechanism is given below:
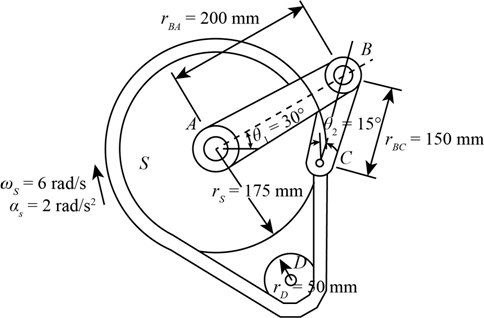
The position vector of the link $AB$ is given by,
\[\begin{array}{c} {{\bf{r}}_1} = {r_{BA}}\cos {\theta _1}{\bf{i}} + {r_{BA}}\sin {\theta _1}{\bf{j}}\\ {{\bf{r}}_1} = \left( {200{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right)\cos \left( {30^\circ } \right){\bf{i}} + \left( {200{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right)\sin \left( {30^\circ } \right){\bf{j}}\\ {{\bf{r}}_1} = \left( {0.1732{\bf{i}} + 0.1{\bf{j}}} \right){\rm{ m}} \end{array}\]
The position vector of the link $BC$ is given by,
\[\begin{array}{c} {{\bf{r}}_2} = - {r_{BC}}\sin {\theta _2}{\bf{i}} - {r_{BC}}\cos {\theta _2}{\bf{j}}\\ {{\bf{r}}_2} = \left( { - 150{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right)\sin \left( {15^\circ } \right){\bf{i}} - \left( {150{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right)\cos \left( {15^\circ } \right){\bf{j}}\\ {{\bf{r}}_2} = \left( { - 0.039{\bf{i}} - 0.145{\bf{j}}} \right){\rm{ m}} \end{array}\]
Step 3 Using the vector addition formula, the velocity of the sprocket is given by,
\[\begin{array}{c} {\omega _{AB}}{\bf{k}} \times {{\bf{r}}_1} + {\omega _{BC}}{\bf{k}} \times {{\bf{r}}_2} = - {\omega _s}{r_s}{\bf{j}}\\ {\omega _{AB}}{\bf{k}} \times \left( {0.1732{\bf{i}} + 0.1{\bf{j}}} \right) + {\omega _{BC}}{\bf{k}} \times \left( { - 0.039{\bf{i}} - 0.145{\bf{j}}} \right) = - \left( {6{\rm{ rad/s}} \times 175{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right){\bf{j}}\\ 0.1732{\omega _{AB}}{\bf{j}} - 0.1{\omega _{AB}}{\bf{i}} - 0.039{\omega _{BC}}{\bf{j}} + 0.145{\omega _{BC}}{\bf{i}} = - 1.05{\bf{j}}\\ \left( {0.1732{\omega _{AB}} - 0.039{\omega _{BC}}} \right){\bf{j}} + \left( {0.145{\omega _{BC}} - 0.1{\omega _{AB}}} \right){\bf{i}} = - 1.05{\bf{j}} \end{array}\]
Comparing the ${\bf{i}}$ components from the above expression, we get,
\[\begin{array}{c} 0.145{\omega _{BC}} - 0.1{\omega _{AB}} = 0\\ 0.145{\omega _{BC}} = 0.1{\omega _{AB}}\\ {\omega _{BC}} = 0.6896{\omega _{AB}}..........(1) \end{array}\]
Comparing the ${\bf{j}}$ components from the above expression, we get,
\[\begin{array}{c} \left( {0.1732{\omega _{AB}} - 0.039{\omega _{BC}}} \right) = - 1.05\\ 0.1732{\omega _{AB}} - 0.039 \times 0.6896{\omega _{AB}} = - 1.05\\ 0.1463{\omega _{AB}} = - 1.05\\ {\omega _{AB}} = - 7.177{\rm{ rad/s}} \end{array}\]
Here, a negative sign indicates that the link AB moves in clockwise direction.
Then, from equation (1), the angular velocity of the link $BC$ is given by,
\[\begin{array}{l} {\omega _{BC}} = 0.6896\left( { - 7.177{\rm{ rad/s}}} \right)\\ {\omega _{BC}} = - 4.95{\rm{ rad/s}} \end{array}\]
Step 4 Using the relative acceleration method, the acceleration of the sprocket is given by,
\[{\alpha _{AB}}{\bf{k}} \times {{\bf{r}}_1} - {\omega _{AB}}^2{{\bf{r}}_1} + {\alpha _{BC}}{\bf{k}} \times {{\bf{r}}_2} - {\omega _{BC}}^2{{\bf{r}}_2} = - {\alpha _s}{r_s}{\bf{j}}\]
Substituting the values in the above expression, we get,
\[\begin{array}{c} \left( \begin{array}{l} {\alpha _{AB}}{\bf{k}} \times \left( {0.1732{\bf{i}} + 0.1{\bf{j}}} \right) - \\ {\left( { - 7.177} \right)^2}\left( {0.1732{\bf{i}} + 0.1{\bf{j}}} \right) + \\ {\alpha _{BC}}{\bf{k}} \times \left( { - 0.039{\bf{i}} - 0.145{\bf{j}}} \right) - \\ {\left( { - 4.95} \right)^2}\left( { - 0.039{\bf{i}} - 0.145{\bf{j}}} \right) \end{array} \right) = \left( { - 2{\rm{ rad/}}{{\rm{s}}^2} \times 175{\rm{ mm}} \times \frac{{1{\rm{ m}}}}{{1000{\rm{ mm}}}}} \right){\bf{j}}\\ \left( \begin{array}{l} 0.1732{\alpha _{AB}}{\bf{j}} - 0.1{\alpha _{AB}}{\bf{i}} - \\ 8.921{\bf{i}} - 5.151{\bf{j}} - \\ 0.039{\alpha _{BC}}{\bf{j}} + 0.145{\alpha _{BC}}{\bf{i}} + \\ 0.9556{\bf{i}} + 3.553{\bf{j}} \end{array} \right) = - 0.35{\bf{j}}\\ \left( \begin{array}{l} \left( { - 0.1{\alpha _{AB}} - 8.921 + 0.145{\alpha _{BC}} + 0.9556} \right){\bf{i}} + \\ \left( {0.1732{\alpha _{AB}} - 5.151 - 0.039{\alpha _{BC}} + 3.553} \right){\bf{j}} \end{array} \right) = - 0.35{\bf{j}} \end{array}\]
Comparing the ${\bf{i}}$ components from the above expression, we get,
\[\begin{array}{c} - 0.1{\alpha _{AB}} - 8.921 + 0.145{\alpha _{BC}} + 0.9556 = 0\\ - 0.1{\alpha _{AB}} + 0.145{\alpha _{BC}} = 7.9654\\ {\alpha _{BC}} = 54.934 + 0.6896{\alpha _{AB}}..........(2) \end{array}\]
Comparing the ${\bf{j}}$ components from the above expression, we get,
\[\begin{array}{c} \left( {0.1732{\alpha _{AB}} - 5.151 - 0.039{\alpha _{BC}} + 3.553} \right) = - 0.35\\ 0.1732{\alpha _{AB}} - 0.039{\alpha _{BC}} = 1.248\\ 0.1732{\alpha _{AB}} - 0.039 \times \left( {54.934 + 0.6896{\alpha _{AB}}} \right) = 1.248\\ 0.1463{\alpha _{AB}} = 3.3904\\ {\alpha _{AB}} = 23.174{\rm{ rad/}}{{\rm{s}}^2} \end{array}\]
Then, from equation (2), the angular acceleration of the link $BC$ is given by,
\[\begin{array}{l} {\alpha _{BC}} = 54.934 + 0.6896\left( {23.174} \right){\rm{ rad/}}{{\rm{s}}^2}\\ {\alpha _{BC}} = 70.915{\rm{ rad/}}{{\rm{s}}^2} \end{array}\]