Step 1 We are given the systems with various dimensions.
We are asked to determine the location of the instantaneous center of zero velocity for finding the velocity of point B.
Step 2 (a)
The diagram of the system is shown as:
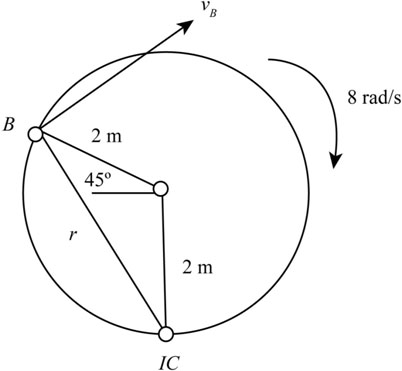
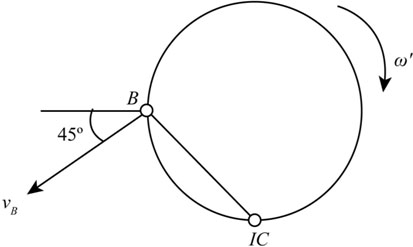
We have the radius of disk is $R = 2\;{\rm{m}}$.
We have the angular velocity of disk is $\omega = 8\;{\rm{rad/s}}$.
We have the angle of point B from horizontal is $\theta = 45^\circ $
Step 3 The formula to calculate the velocity at point B is,
\[{v_B} = \omega \times r\]
Step 4 The formula to calculate the distance r is,
\[{r^2} = {\left( {R\cos \theta } \right)^2} + {\left( {R + R\sin \theta } \right)^2}\]
Step 5 Substitute the values in the above expression.
\[\begin{array}{l} {r^2} = {\left( {2\cos 45^\circ \;{\rm{m}}} \right)^2} + {\left( {2\;{\rm{m}} + 2{\rm{sin}}45^\circ \;{\rm{m}}} \right)^2}\\ r = \sqrt {13.6\;{{\rm{m}}^2}} \\ r = 3.7\;{\rm{m}} \end{array}\]
Step 6 (b)
The diagram of the system is shown as:
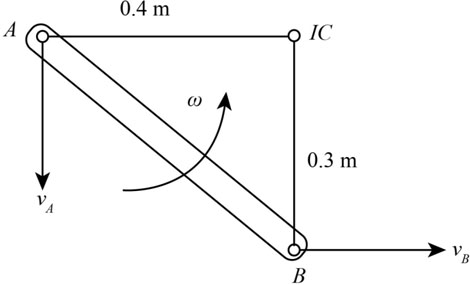
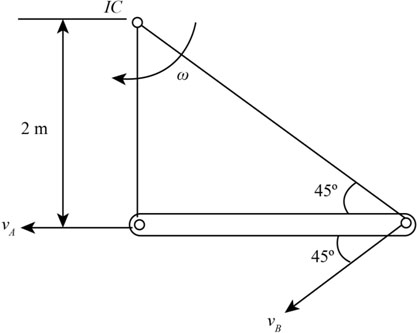
We have the position vector of point A is ${r_A} = \left( {2i} \right)\;{\rm{m}}$.
We have the angular velocity is $\omega = - 4k\;{\rm{rad/s}}$.
We have the vertical distance of point B from instantaneous center is $r = 0.3\;{\rm{m}}$.
Step 7 The formula to calculate the velocity at point A is,
\[{v_A} = \omega \times {r_A}\]
Step 8 Substitute the values in the above expression.
\[\begin{array}{l} {v_A} = \left( { - 4k} \right)\;{\rm{rad/s}} \times \left( {2i} \right)\;{\rm{m}}\\ {v_A} = \left( { - 8j} \right)\;{\rm{m/s}} \end{array}\]
Here, negative sign shows that the direction of velocity is downward.
Step 9 The formula to calculate the velocity at point B is,
\[{v_B} = r\omega \]
Step 10 Substitute the values in the above expression.
\[{v_B} = \left( {0.3\;{\rm{m}}} \right)\omega \]
Step 11 (c)
The diagram of the system is shown as:
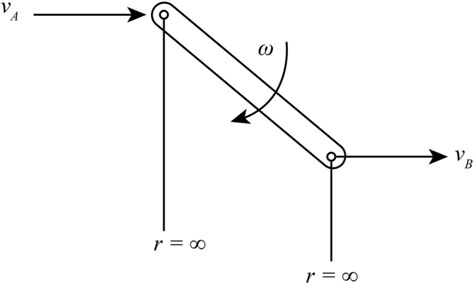
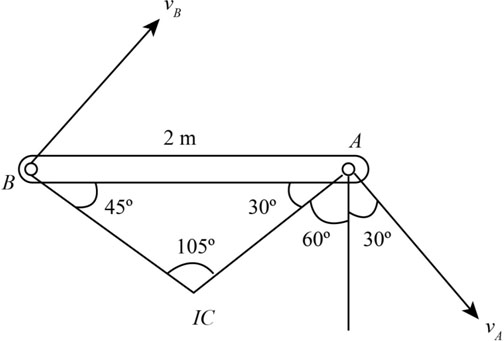
We have the position vector of point A is ${r_A} = \left( {0.5j} \right)\;{\rm{m}}$.
We have the position vector of point A with respect to B is ${r_{BA}} = \left( {1.5\cos 30^\circ i + 1.5\sin 30^\circ j} \right)\;{\rm{m}} = \left( {1.3i + 0.75j} \right)\;{\rm{m}}$ We have the angular velocity is $\omega = - 4k\;{\rm{rad/s}}$.
Step 12 The formula to calculate the velocity at point A is,
\[{v_A} = \omega \times {r_A}\]
Step 13 Substitute the values in the above expression.
\[\begin{array}{l} {v_A} = \left( { - 4k} \right)\;{\rm{rad/s}} \times \left( {0.5j} \right)\;{\rm{m}}\\ {v_A} = \left( {2i} \right)\;{\rm{m/s}} \end{array}\]
Step 14 The formula to calculate the velocity at point B is,
\[{v_B} = {v_A} + {\omega _{AB}}\left( {{r_{BA}}} \right)\]
Step 15 Substitute the values in the above expression.
\[\begin{array}{l} {v_B}i = \left( {2i} \right)\;{\rm{m/s}} + \left( {{\omega _{AB}}} \right)\left( {1.3i + 0.75j} \right)\;{\rm{m}}\\ {v_B}i = \left( {2 - 1.3{\omega _{AB}}} \right)i + 0.75{\omega _{AB}}j \end{array}\]
On comparing j coefficients, we get:
\[{\omega _{AB}} = 0\]
Step 16 Substitute the value of ${\omega _{AB}}$ in expression of ${v_B}i$.
\[{v_B} = {v_B} = \left( {2i} \right)\;{\rm{m/s}}\]
Step 17 (d)
The diagram of the system is shown as:
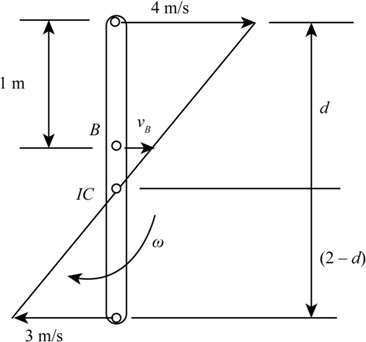
We have the velocity of point C is ${v_C} = 4\;{\rm{m/s}}$.
We have the distance between point B and C is $y = 1\;{\rm{m}}$.
Step 18 The formula to calculate the velocity at point B by using similar triangle theorem is,
\[\frac{{{v_B}}}{y} = \frac{{{v_C}}}{d}\]
Step 19 Substitute the values in the above expression.
\[\frac{{{v_B}}}{{1\;{\rm{m}}}} = \frac{{4\;{\rm{m/s}}}}{d}\]
Thus, the required instantaneous velocity is drawn and obtained for expression velocity at point B.
Step 20 (e)
The diagram of the system is shown as:
We have the position vector of point A is ${r_A} = \left( {0.5j} \right)\;{\rm{m}}$.
We have the angular velocity is $\omega = - 3k\;{\rm{rad/s}}$.
Step 21 The formula to calculate the velocity at point A is,
\[{v_A} = \omega \times {r_A}\]
Step 22 Substitute the values in the above expression.
\[\begin{array}{l} {v_A} = \left( { - 3k} \right)\;{\rm{rad/s}} \times \left( {0.5j} \right)\;{\rm{m}}\\ {v_A} = \left( { - 1.5i} \right)\;{\rm{m/s}} \end{array}\]
Here, negative sign shows that the direction of velocity is towards left.
Step 23 The diagram of instantaneous velocity diagram of the disk is shown as,
Step 24 (f)
The diagram of the system is shown as:
We have the position vector of point A is ${r_A} = \left( { - 0.5\cos 30^\circ i + 0.5\sin 30^\circ j} \right)\;{\rm{m}} = \left( { - 0.433i + 0.25j} \right)\;{\rm{m}}$.
We have the angular velocity is $\omega = - 6k\;{\rm{rad/s}}$.
Step 25 The formula to calculate the velocity at point A is,
\[{v_A} = \omega \times {r_A}\]
Step 26 Substitute the values in the above expression.
\[{v_A} = \left( { - 6k} \right)\;{\rm{rad/s}} \times \left( { - 0.433i + 0.25j} \right)\;{\rm{m}}\]