Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 3P from Chapter 18 from Hibbeler's Engineering Mechanics.
Problem 3P
Step-by-Step Solution
We are given a wheel made from a thin ring and two slender rods.
The mass of the thin ring is ${m_1} = 5{\rm{ kg}}$.
The mass of each slender rod is ${m_2} = 2{\rm{ kg}}$.
The stiffness of the torsional spring attached to the wheel’s center is $k = 2{\rm{ N}} \cdot {\rm{m/rad}}$.
The torque on the center of the wheel is given by,
\[M = \left( {2\theta } \right){\rm{ N}} \cdot {\rm{m}}\]Here $\theta $ is in radians.
We are asked to determine the maximum angular velocity of the wheel if it is rotated two revolutions and then released from rest.
Step 2
The free-body diagram of the wheel is given by,
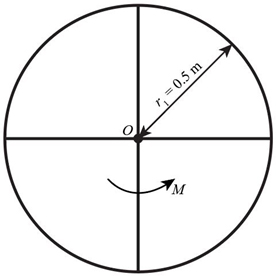
Here, ${r_1}$ is the radius of the thin ring.
Step 3
The total moment of inertia of the wheel about its center is given by,
\[\begin{array}{c} {I_o} = {I_1} + 2{I_2}\\ {I_o} = {m_1}{r_1}^2 + 2\left[ {\frac{1}{{12}}{m_2}{{\left( {2{r_2}} \right)}^2}} \right] \end{array}\]Substituting the values in the above expression, we get,
\[\begin{array}{c} {I_o} = \left( {5{\rm{ kg}}} \right){\left( {0.5{\rm{ m}}} \right)^2} + 2\left[ {\frac{1}{{12}}\left( {2{\rm{ kg}}} \right){{\left( {2 \times 0.5{\rm{ m}}} \right)}^2}} \right]\\ {I_o} = 1.25{\rm{ kg}} \cdot {{\rm{m}}^2} + 0.33{\rm{ kg}} \cdot {{\rm{m}}^2}\\ {I_o} = 1.583{\rm{ kg}} \cdot {{\rm{m}}^2} \end{array}\]Step 4
The expression for the initial kinetic energy of the rod is given by,
\[{T_1} = \frac{1}{2}m{v_1}^2\]At initial condition, there is no movement of the wheel, so the initial velocity of the wheel will be zero ${v_1} = 0$.
\[\begin{array}{l} {T_1} = \frac{1}{2}m{\left( 0 \right)^2}\\ {T_1} = 0 \end{array}\]Step 5
The expression for the final kinetic energy of the rod is given by,
\[{T_2} = \frac{1}{2}{I_G}{\omega _2}^2\]The expression for the total potential energy of the wheel in completing two revolutions $\left( {\theta = 4\pi } \right)$ is given by,
\[\begin{array}{l} {U_{1 - 2}} = \int_{\theta = 0}^{4\pi } {M \cdot d} \theta \\ {U_{1 - 2}} = \int_{\theta = 0}^{4\pi } {2\theta \cdot d} \theta \end{array}\]Step 6
Solving the above integration and substituting the limit values, we get,
\[\begin{array}{l} {U_{1 - 2}} = 2\left[ {\frac{{{\theta ^2}}}{2}} \right]_{\theta = 0}^{4\pi }\\ {U_{1 - 2}} = 2\left[ {\frac{{{{\left( {4\pi } \right)}^2}}}{2} - 0} \right]\\ {U_{1 - 2}} = 16{\pi ^2} \end{array}\]Now applying the conservation of energy principle to the system, we get,
\[\begin{array}{c} {T_1} + {U_{1 - 2}} = {T_2}\\ 0 + 16{\pi ^2} = \frac{1}{2}\left( {1.583} \right){\omega ^2}\\ 157.914 = 0.7917{\omega ^2}\\ \omega = 14.1{\rm{ rad/s}} \end{array}\]