Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 4CP from Chapter 18 from Hibbeler's Engineering Mechanics.
Problem 4CP
Step-by-Step Solution
First it is convenient to draw a representation of the system in its initial state.
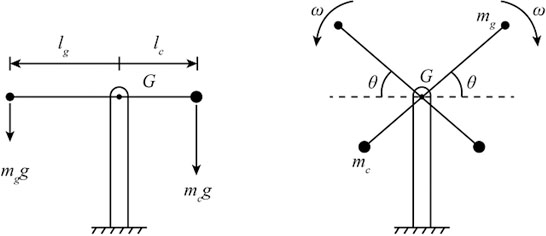
Here, m is the mass of counter weight, M is the mass of bridge, g is the acceleration due to gravity, l is the distance of counter weight from rotational point O, and L is the distance of mass center of bridge from rotational point O.
Step 2
Apply equilibrium equation for the torque in rotation about point O.
\[\begin{array}{c} \sum {{M_O}} = 0\\ mgl - MgL = 0\\ ml = ML \end{array}\]……(1)Step 3
Draw a labeled diagram of the final state of the bridge.
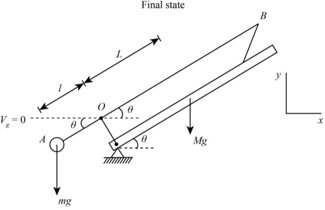
Consider the diagram of final state of the bridge, the final potential energy ${V_2}$ for an arbitrary angle $\theta $ is given by:
\[\begin{array}{c} {V_2} = MgL\sin \theta - mgl\sin \theta \\ = g\sin \theta \left( {ML - ml} \right) \end{array}\]Substitute the value of ML from equation (1) in the above equation:
\[\begin{array}{l} {V_2} = g\sin \theta \left( {ml - ml} \right)\\ {V_2} = 0 \end{array}\]Step 4
Apply the principle of conservation of energy:
\[{V_1} + {T_1} = {V_2} + {T_2}\]……(2)Here, ${V_1} = {V_2} = {T_1} = 0$
Then, we get from equation (2):
\[\begin{array}{c} 0 + 0 = 0 + {T_2}\\ {T_2} = 0 \end{array}\]The final kinetic energy is zero. Then, if the system is originally in equilibrium, it will be in equilibrium for an arbitrary angle $\theta $.
Step 5
Assume the values of the variable as:
\[\begin{array}{c} M = 2500\;{\rm{kg}}\\ L = 10\;{\rm{m}}\\ l = 4\;{\rm{m}} \end{array}\]Substitute these assumed values in equation (1):
\[\begin{array}{c} m\left( {4\;{\rm{m}}} \right) = \left( {2500\;{\rm{kg}}} \right)\left( {10\;{\rm{m}}} \right)\\ m = 6250\;{\rm{kg}} \end{array}\]