Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 14P from Chapter 20 from Hibbeler's Engineering Mechanics.
Problem 14P
Step-by-Step Solution
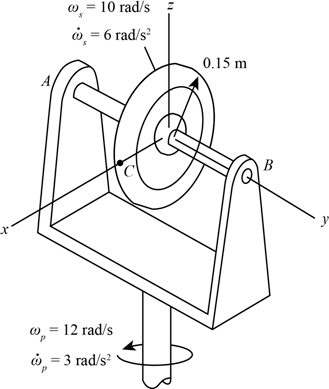
We are given a wheel spinning about the shaft $AB$. The following data is given:
The angular velocity of the wheel is ${\omega _s} = 10{\rm{ rad/s}}$.
The increasing rate of the angular velocity is ${\dot \omega _s} = 6\;{\rm{rad/}}{{\rm{s}}^{\rm{2}}}$.
The angular velocity of the frame is ${\omega _p} = 12\;{\rm{rad/s}}$.
The increasing rate of the angular velocity of the frame is ${\dot \omega _p} = 3\;{\rm{rad/}}{{\rm{s}}^{\rm{2}}}$.
We are asked to determine the velocity and acceleration of point $C$ located on the rim of the wheel.
Step 2
The diagram of the wheel showing its velocity and acceleration is given below:
The vector representation of the expression for the angular velocity of the wheel is given by,
\[\begin{array}{c} \omega = {\omega _s}{\bf{j}} + {\omega _p}{\bf{k}}\\ \omega = \left( {10{\bf{j}} + 12{\bf{k}}} \right)\;{\rm{rad/s}} \end{array}\]Step 3
The increasing rate of the angular velocity of the wheel with respect to $xyz$ is given by,
\[{\left( {{{\dot \omega }_s}} \right)_{xyz}} = 6{\bf{j}}\;{\rm{rad/}}{{\rm{s}}^{\rm{2}}}\]The increasing rate of the angular velocity of the frame with respect to $xyz$ is given by,
\[{\left( {{{\dot \omega }_p}} \right)_{xyz}} = 3{\bf{k}}\;{\rm{rad/}}{{\rm{s}}^{\rm{2}}}\]Step 4
The expression for the increasing rate of angular acceleration of the wheel is given by,
\[\begin{array}{c} {{\dot \omega }_s} = \left[ {{{\left( {{{\dot \omega }_s}} \right)}_{xyz}} + {\omega _p} \times {\omega _s}} \right]\\ {{\dot \omega }_s} = \left[ {6{\bf{j}} + \left( {12{\bf{k}}} \right) \times \left( {10{\bf{j}}} \right)} \right]\;{\rm{rad/}}{{\rm{s}}^2} \end{array}\]The expression for the increasing rate of angular acceleration of the frame is given by,
\[\begin{array}{c} {{\dot \omega }_p} = \left[ {{{\left( {{{\dot \omega }_p}} \right)}_{xyz}} + {\omega _p} \times {\omega _p}} \right]\\ {{\dot \omega }_p} = \left[ {{{\left( {{{\dot \omega }_p}} \right)}_{xyz}} + \left( {12{\bf{k}}} \right) \times \left( {12{\bf{k}}} \right)} \right]\\ {{\dot \omega }_p} = \left[ {\left( {3{\bf{k}}} \right) + 0} \right]\\ {{\dot \omega }_p} = \left( {3{\bf{k}}} \right)\;{\rm{rad/}}{{\rm{s}}^2} \end{array}\]Step 5
The vector representation of the expression for the angular acceleration of the wheel is given by,
\[\begin{array}{c} \alpha = \dot \omega \\ \alpha = {{\dot \omega }_s} + {{\dot \omega }_p}\\ \alpha = \left[ {6{\bf{j}} + \left( {12{\bf{k}}} \right) \times \left( {10{\bf{j}}} \right)} \right]\;{\rm{rad/}}{{\rm{s}}^2} + \left( {3{\bf{k}}} \right)\;{\rm{rad/}}{{\rm{s}}^2}\\ \alpha = \left( { - 120{\bf{i}} + 6{\bf{j}} + 3{\bf{k}}} \right)\;{\rm{rad/}}{{\rm{s}}^{\rm{2}}} \end{array}\]The expression for the position vector of point $C$ is given by,
\[{{\bf{r}}_C} = \left( {0.15{\bf{i}}} \right)\;{\rm{m}}\]Step 6
Using the relation between the linear velocity and the angular velocity, the linear velocity of the point $C$ is given by,
\[\begin{array}{c} {v_C} = \omega \times {{\bf{r}}_C}\\ {v_C} = \left( {10{\bf{j}} + 12{\bf{k}}} \right) \times \left( {0.15{\bf{i}}} \right)\\ {v_C} = \left( {1.8{\bf{j}} - 1.5{\bf{k}}} \right)\;{\rm{m/s}} \end{array}\]The expression for the linear acceleration of point $C$ is given by,
\[\begin{array}{c} {a_C} = \alpha \times {{\bf{r}}_C} + \omega \times {v_C}\\ {a_C} = \left( { - 120{\bf{i}} + 6{\bf{j}} + 3{\bf{k}}} \right) \times \left( {0.15{\bf{i}}} \right) + \left( {10{\bf{j}} + 12{\bf{k}}} \right) \times \left( {1.8{\bf{j}} - 1.5{\bf{k}}} \right)\\ {a_C} = \left[ { - 36.6{\bf{i}} + 0.45{\bf{j}} - 0.9{\bf{k}}} \right]\;{\rm{m/}}{{\rm{s}}^2} \end{array}\]