Engineering Mechanics: Statics and Dynamics, 14th Edition
Authors: Russell C. Hibbeler
ISBN-13: 978-0133915426
See our solution for Question 47P from Chapter 22 from Hibbeler's Engineering Mechanics.
Problem 47P
Step-by-Step Solution
We are given the periodic force as $F = {F_0}\sin \omega t$, and the spring constant as $k$.
We are asked to determine the amplitude of the steady-state vibration.
Step 2
We will draw a free body diagram of the rod.
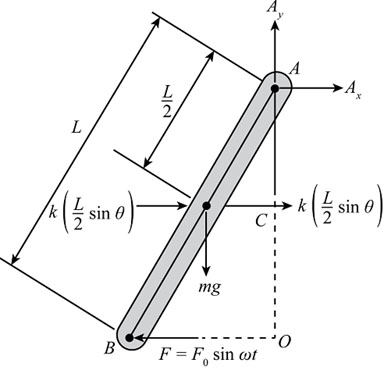
Here, $m$ is the mass of the rod, ${A_x}$ and ${A_y}$ are the reaction forces at point $A$, $L$ is the length of the rod, and $g$ is the gravitational acceleration.
Step 3
We will take the moment about point $A$.
\[\begin{array}{c} \sum {{M_A}} = I\ddot \theta \\ \left[ \begin{array}{l} F \times L\cos \theta - k\left( {\frac{L}{2}\sin \theta } \right) \times \left( {\frac{L}{2}\cos \theta } \right) - \\ mg\left( {\frac{L}{2}\sin \theta } \right) - k\left( {\frac{L}{2}\sin \theta } \right) \times \left( {\frac{L}{2}\cos \theta } \right) \end{array} \right] = \left( {\frac{1}{3}m{L^2}} \right)\ddot \theta \\ FL\cos \theta - 2k\left( {\frac{L}{2}\sin \theta } \right) \times \left( {\frac{L}{2}\cos \theta } \right) - mg\left( {\frac{L}{2}\sin \theta } \right) = \left( {\frac{1}{3}m{L^2}} \right)\ddot \theta \;\;\;\;\;\;...\left( 1 \right) \end{array}\]Here, $I$ is the moment of inertia of the rod about point $A$.
For the very small angle, $\sin \theta \approx \theta $ and $\cos \theta \approx 1$.
Substitute the given value in the above equation.
\[\begin{array}{c} \left( {{F_0}\sin \omega t} \right)L\left( 1 \right) - 2k\left( {\frac{L}{2}\theta } \right) \times \left( {\frac{L}{2}\left( 1 \right)} \right) - mg\left( {\frac{L}{2}\theta } \right) = \left( {\frac{1}{3}m{L^2}} \right)\ddot \theta \\ \left( {{F_0}L\sin \omega t} \right) - \left( {\frac{{k{L^2}}}{2}} \right)\theta - \left( {\frac{{mgL}}{2}} \right)\theta = \left( {\frac{{m{L^2}}}{3}} \right)\ddot \theta \\ \left( {\frac{{m{L^2}}}{3}} \right)\ddot \theta + \left( {\frac{{k{L^2}}}{2} + \frac{{mgL}}{2}} \right)\theta = \left( {{F_0}L\sin \omega t} \right)\,\;\;\;\;\;...\left( 2 \right) \end{array}\]Step 4
The formula of the angular displacement is given below.
\[\theta = C\sin \omega t\;\;\;...\left( 3 \right)\]Here, $C$ is the amplitude of steady state vibration, and $\omega $ is the frequency of the system.
Differentiate the above equation with respect to time.
\[\begin{array}{l} \dot \theta = \frac{d}{{dt}}\left( {C\sin \omega t} \right)\\ \dot \theta = \omega C\cos \omega t\;\;\;\;\;\;\;\;...\left( 4 \right) \end{array}\]Step 5
Differentiate the equation (4) with respect to time.
\[\begin{array}{l} \ddot \theta = \frac{d}{{dt}}\left( {\omega C\cos \omega t} \right)\\ \ddot \theta = - {\omega ^2}C\sin \omega t\;\;\;\;\;\;\;\;...\left( 5 \right) \end{array}\]Step 6
Substitute the given vale in equation (2) to find the amplitude of the steady-state vibration.
\[\begin{array}{c} \left( {\frac{{m{L^2}}}{3}} \right)\left( { - {\omega ^2}C\sin \omega t} \right) + \left( {\frac{{k{L^2}}}{2} + \frac{{mgL}}{2}} \right)\left( {C\sin \omega t} \right) = \left( {{F_0}L\sin \omega t} \right)\\ C\left[ {\left( {\frac{{m{L^2}}}{3}} \right)\left( { - {\omega ^2}} \right) + \left( {\frac{{k{L^2}}}{2} + \frac{{mgL}}{2}} \right)} \right] = {F_0}L\\ C = \frac{{{F_0}}}{{\left[ {\frac{{kL + mg}}{2} - \frac{{m{\omega ^2}L}}{3}} \right]}}\\ C = \frac{{3{F_0}}}{{\left[ {\frac{{3\left( {kL + mg} \right)}}{2} - m{\omega ^2}L} \right]}} \end{array}\]